- Research
- Open access
- Published:
An overview of the plastic-hinge analysis of 3D steel frames
Asia Pacific Journal on Computational Engineering volume 2, Article number: 4 (2015)
Abstract
An overview of plastic-hinge model for steel frames under static loads is carried out in this paper. Both rigid-plastic and elastic-plastic methods for framed structures are reviewed, including advantages and disadvantages of each method. It concerns both analysis and optimization methodologies. The modeling of 3D plastic hinges by using the normality rule of the plasticity is described. The paper also touches on the consideration of strain hardening in the plastic-hinge modeling. Related to take into account different phenomena (distributed plasticity, imperfections, stiffness degradation, etc.), the practical modeling of members is summarized. How to consider behaviors and cost of beam-to-column connections is discussed. The existing methods to capture large displacements are briefly presented, as well as global formulations for different types of analysis and optimization procedures. For the illustration, several numerical examples are carried out, including a “loss a column” scenario in the robustness analysis.
Background
Steel frames show a high nonlinear behavior due to the plasticity of the material and the slenderness of members. How to approach the “actual” behavior of steel frames has been a large subject in the research field of constructional computation. In general, either the plastic-zone or the plastic-hinge approach is adopted to capture the inelasticity of material and geometric nonlinearity of a framed structure.
In the plastic-zone method, according to the requirement of refinement degree, a structure member should be discretized into a mesh of finite elements where the nonlinearities are involved. Thus, this approach may describe the “actual” behavior of structures, and it is known as a “quasi-exact” solution. However, although tremendous advances in computer hardware and numerical techniques were achieved, plastic-zone method is still considered as an “expensive” one, requiring considerable computing burden. Moreover, software based on the plastic-zone approach requires the expertise of users.
On the other hand, the plastic-hinge approach demands only one beam-column element per physical member to assess approximately the nonlinear properties of the structures; so the computation time is considerably reduced. In addition, computer programs using the plastic-hinge model are familiar to the habit of engineers. Thanks to these advantages, it appears that the plastic-hinge method is more widely used in practice by engineers than the plastic-zone method. Wherefore, the improvement in the accurateness of the plastic-hinge approach has been an attractive topic since over the past 60 years.
The present paper consists in an overview of the plastic-hinge approach for 3D steel frames. Both the rigid-plastic and elastic-plastic methods for framed structures are reviewed, including the advantages and disadvantages of each method. It concerns both analysis and optimization methodologies. Furthermore, a description of the modeling of 3D plastic hinges by using the normality rule of the plasticity is done. The consideration of strain hardening in the plastic modeling is also touched on. By taking into account different phenomena (distributed plasticity, imperfections, stiffness degradation, etc.), we summarize the practical modeling of members. How to consider behaviors and cost of beam-to-column connections is discussed. The existing methods to capture large displacements are briefly presented, as well as global formulations for different types of analysis and optimization procedures. For the illustration, several numerical examples are carried out, including a “loss a column” scenario in the robustness analysis.
Generality on the behavior of frames
Plastic behavior
The plastic behavior of structures in general and of framed structures in particular was well dealt with in many text books (e.g. Neal [62], Hodge [33], Save [69], Massonnet [58], Nguyen-Dang [65], König [48], Chen [9], Lubliner [55], Mróz [61], Weichert [75] and Jirásek [41], among others). Generally, the plastic behavior of steel structures depends on the type of loading that may be classified as the following:
-
Monotonous loading where all applied loads are monotonically increased with a unique loading factor.
-
Fixed repeated loading where the loads are repeated (loading, un-loading and re-loading and so on), but the protocol is defined (defined history).
-
Arbitrary repeated loading where each load varies independently with arbitrary history, but within their limits (maximum and minimum values, Fig. 1).
Fig. 1 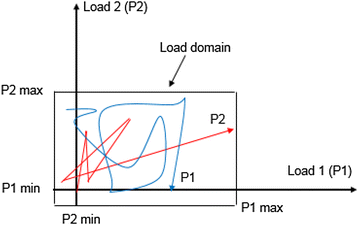
Complex loads (arbitrary loading history)

The monotonous loading and the fixed repeated loading are two particular cases of the arbitrary repeated loading. Therefore, in this paper, the terms ‘complex loads’ and ‘simple loads’ may be used to indicate the arbitrary repeated loading and the monotonous/fixed repeated loadings, respectively.
In the practice of construction, a structure may be subjected to various kinds of load, for example: dead load, live load, wind load, effects of earthquake, etc. The dead load consists of the weight of the structure itself and its cladding. The dead load remains constant, but other loads vary continually. Those variations are normally independent and repeated with arbitrary histories. It is clear that the structure is normally subjected to the loads with arbitrary histories; so the simple loads are used as a simplification in calculations.
The behavior of a frame under the monotonous loading may be described in Fig. 2. The frames firstly works in the elastic domain, then the plastic deformation (plastic hinges) occurs leading to a progressive decrease of the frame stiffness (elastic-plastic behavior) and finally the stiffness may be considered to be vanished (totally plastic). In the classic conception, the limit state is reached when the number of plastic hinges is enough such that the frame is considered as a deformable geometry system (if the plastic hinges are replaced by “real” hinges).

Plastic behavior of steel frame under monotonous loading
Under the repeated loading, the behavior of the frame may be described in Fig. 3 that corresponds to the three following possibilities:

Behaviors of steel frames under repeated loading
-
1.
The structure returns to the elastic range after having some plastic deformations (Fig. 3a); the structure is referred to as shakedown (plastic stability/plastic adaptation).
-
2.
Plastics deformation constitutes a closed cycle (Fig. 3b), the structure is presumed to be failed by alternating plasticity (low-cycle fatigue);
-
3.
Plastic deformation implies an infinitely progress (Fig. 3c), the structure is considered to be failed by incremental plasticity.
The alternating plasticity or the incremental plasticity behaviors may be accepted in some exceptional load cases (as a seismic event), while these behaviors should be avoided in normal state where the shakedown behavior should be planed. The shakedown analysis aims to determine the load domain for the complex load cases (Fig. 2) such that the shakedown occurs in the structure. In other words, the shakedown analysis is a straight method (“one step”) to avoid the alternating plasticity or the incremental plasticity in structures without knowing the loading histories.
Geometric nonlinearities
The behavior described in Fig. 2 ignores the geometric nonlinearity that is very explicit within steel frames. The term “geometric nonlinearity” means that the deformed configuration of the frame is considered. Generally, there are two types of effects due to the geometric nonlinearities (Fig. 4): membrane effect and buckling effect. The membrane effect normally develops at a quite large displacement, and rarely observed in a normal state. So far, the membrane effect is mainly considered in the robustness analysis to assess the robustness degree of structures (see Demonceau [19]). On the other hand, the buckling effect leads to almost failure of steel frames, and this effect is one of the main aspects concerning steel structure research.

Geometric nonlinearity effects
Plastic methods for framed structures
During the past 60 years, the theories of plasticity, stability and computing technology have recorded great achievements that constitutes the basis allowing scientists to develop successfully plastic methods for structures. The framed structures are often regarded as benchmark to build up computation methods for other kinds of structure. Up to now, plastic methods for framed structures can be classed into two groups: direct methods and step-by-step method.
Direct methods
The term “direct methods” consists in the rigid-plastic methods that the load multiplier can be directly identified without any intermediate states of structures. The direct methods are based on the static and kinematic theorems—two fundamental theorems of the limit analysis, which lead to static approach and kinematic approach, respectively.
In the 1950s, the first plastic methods (e.g., trial and error method, a combination of mechanism method and plastic moment distribution method) were proposed by Baker, Neal, Symonds and Horne (see Neal [62]). Since the 1970s, the direct methods have been largely developed thanks to the application of mathematical programming; in particular, the linear programming problem can be generally solved through the simplex method (see Dantzig [20]). An overall picture on the application of the mathematical programming to structural analysis can be found from: the state-of-the-art report of Grierson [26]; the book edited by Cohn [13]; the state-of-the-art papers and the key note of Maier [56, 57]; the book edited by Smith [71]; and other papers by Cocchetti [12], Nguyen-Dang [66]. Additionally, some interesting computer programs were built up, e.g. DAPS [68], STRUPL-ANALYSIS [25], CEPAO [29, 32, 66] where the linear programming technique is combined with the finite element method that enables automatic procedures.
The following types of analysis and optimization are generally based on the direct methods:
-
Limit analysis
-
Shakedown analysis
-
Limit optimization
-
Shakedown optimization
Even if the shakedown problem is classed in the rigid-plastic analysis, the elastic behavior of structures is needed for the shakedown analysis/optimization.
Advantages of the direct methods
It reveals that this type of analysis is:
-
capable of taking full advantage of mathematical programming achievements.
-
suitable to solve structures subjected to arbitrary repeated loading (shakedown problem).
-
possible to unify into unique computer program because the algorithms of the direct methods for different procedures are similar, such as: limit or shakedown, analysis or optimization, frames or plate/shell, etc.
-
not influenced by local behaviors of structures, namely the elastic return (a phenomenon often occurs in the step-by-step methods). There exists sometimes degenerate phenomenon in the simplex method but it is treated by the lexicographical rule (see Dentzig [20]).
Limitations of the direct methods
Some their drawbacks may be evoked here: difficulties arise
-
when the geometric nonlinearity conditions are taken into account, so it poses a great challenge.
-
when solving large-scale frames, because the direct methods belong to “one step” approaches.
Step-by-step methods
Step-by-step methods or elastic-plastic incremental methods are based on the standard methods of the elastic analysis. The loading process is divided into various steps. After each loading step, the stiffness matrix is updated to take into account nonlinear effects. In comparison with the elastic solution, only the physical matrix is varied to consider the plastic behavior. The step-by-step methods take advantage of large experiences of the linear elastic analysis by the finite element method. One may find many useful computational algorithms and techniques in many text books (e.g., Bathe [2, 3], among others). Commercial software for structural analysis has been almost developed by adapting the step-be-step methods.
Compared to the direct methods, the step-by-step methods have the following features:
Advantages of the step-by-step method
-
The geometric nonlinearity is appropriately taken into account.
-
The step-by-step methods furnish a complete redistribution progress prior to the collapse of structures.
-
With the progress in both computing hardware and numerical technology, the modeling of complex structures, even very large scales, may be dealt with.
Limitations of the step-by-step methods
-
For the case of arbitrary loading histories (shakedown problem), the step-by-step methods are cumbersome and embed many difficulties.
-
With the elastic-plastic analysis of frames, this method is influenced by the local behavior of structures, such as the elastic return, it may lead to an erroneous solution.
Plastic-hinge modeling
Plastic-hinge modeling is an important issue of the plastic analysis for framed structures; it influences not only the accurateness but also the formulation procedure. To model plastic hinges, the yield surface is firstly needed to be defined and then the relationship between forces and plastic deformations at the plastic hinges is necessary to be established.
Yield surfaces
In regards to beam-column members in 3D frames, the yield surfaces are generally written under the form of the interaction between axial force and two bending moments (Eq. (1)), the influences of shear forces and torsional moments are usually neglected.
in Eq. (1), n = N/N p is the ratio of the axial force over squash load, m y = M y /M py and m z = M z /M pz are, respectively, the ratios of minor-axis and major-axis moments to corresponding plastic moments.
The yield surfaces of Orbison [67] and of AISC [1] are generally adopted for I- or H-shaped sections that are often used in steel frames. Orbison’s yield surface is a single-smooth-convex-nonlinear function while the AISC yield surface is a sixteen-facet polyhedron. The equations are presented bellows:
-
Orbison’s yield surface [67] (Fig. 5b):
$$\varphi = 1.15n^{ 2} + m_{z}^{ 2} + m_{y}^{ 4} + 3.67n^{2} m_{z}^{ 2} + 3n^{6} m_{y}^{2} + 4.65m_{y}^{2} m_{z}^{4} = 1$$(2)Fig. 5 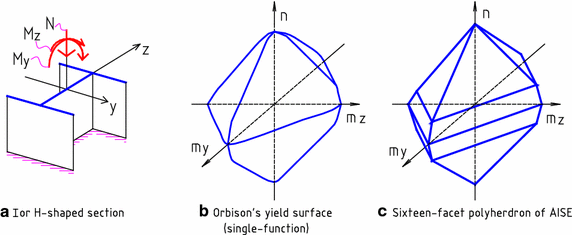
Yield surfaces
-
Yield surface of AISC [1] (Fig. 5c):
$$\begin{aligned} \left| n \right| + (8/9)\left| {m_{y} } \right| + (8/9)\left| {m_{z} } \right| = 1\,{\text{for}}\,\left| n \right| \ge 0.2; \hfill \\ (1/2)\left| n \right| + \left| {m_{y} } \right| + \left| {m_{z} } \right| = 1\,{\text{for}}\,\left| n \right| < 0.2; \hfill \\ \end{aligned}$$(3)

Orbison’s yield surface is very suitable to the elastic-plastic analysis by step-by-step method for 3-D steel frames, it has been widely applied (see Orbison [67], Liew [51, 52], Kim [42–45], Chiorean [11], among others). On the other hand, the polyhedrons [e.g. the sixteen-facet polyhedron, Eq. (3)] obviously are the unique way allowing the use of the linear programming technique in the rigid-plastic analysis.
Other definitions of yield surface have been also used in some researches (e.g., Izzuddin [37]). In particular, adapted yield surfaces for various shape section of steel profiles can be found in Meas [60], where the coefficients in Eq. (2) are varied for each type of cross section.
Plastic deformation
Various hypotheses on the plastic deformation of plastic hinges may be found in the literature. However, the normality rule of the plasticity is an efficient way to describe the plastic deformation evolution of a plastic hinge. When the effects of two bending moments and axial force are taken into account, the associated deformations are two rotations and one axial component (Fig. 6a). The normality rule may be applied for this case as follows:
or symbolically:
where λ is the plastic deformation magnitude; \({\mathbf{N}}\) is a gradient vector at a point of the yield surface ϕ; \({\mathbf{e}}^{\text{p}}\) collects the plastic deformation. Figure 6b describes this normality rule.

Plastic deformation in the plastic hinge
The application of the normality rule for the 3D plastic hinge was detailed in Hoang [32] for the step-by-step method where Orbison’ yield surface was adopted; or in Hoang [30, 33] for the rigid-plastic analysis using the polyhedron yield surface.
Force: plastic deformation relationship
In the elastic-plastic analysis based on step-by-step method, incremental force–deformation relation is generally used. Let Δs is the vector of the incremental forces (axial force and two bending moments) in the plastic hinge; this vector must be tangent to the yield surface. On the other hand, since the vector of incremental plastic deformation is perpendicular to the yield surface, the two vectors: incremental plastic deformation and incremental forces are perpendicular (Fig. 7):
In another context, the rigid-plastic analysis adopts the plastic dissipation conception:
In Eq. (7), s 0 is the vector of the plastic capacities of the cross section (at the plastic hinges). Equation (7) shows that the plastic dissipation depends only on \({\dot{\mathbf{\lambda }}}\) because \({\mathbf{s}}_{0}\) is a given constant vector for each critical section. The plastic dissipation must be minimum while the compatibility and equilibrium conditions must be respected; this is the governed idea in the formulation of the rigid-plastic analysis.

The relationship between forces and plastic deformation
Strain hardening consideration
Most of plastic-hinge analysis omit the strain hardening effect of the steel material; however, this effect has been included in some works (e.g., Byfield [6], Davies ([17], [18]), and Hoang [31]). The Ref. [31] presented a procedure to take into account the strain hardening effect by using the isotropic strain hardening rule. The diagram \(\sigma - \varepsilon\) shown on Fig. 8a is adopted for the material behavior, and the cross section (plastic hinge) behavior is described as:

Hardening rule
In Eqs. (8), (9), (10), \(\varphi\) is the yield surface of the cross section [e.g., Orbison’s yield surface in Eq. (2)]; H is the strain hardening modulus (or plastic modulus), it is assumed constant (linear hardening low); \(\bar{\varepsilon }^{p}\) is the effective strain that is defined below; \(\bar{\varepsilon }_{l}^{p}\) is the limit effective strain. How to determine these parameters, and also how to involve the yield surface given by Eq. (8) into the global formulation procedure can be found in Hoang [31].
Equations (8), (9), (10) describe, respectively, the elastic range, the hardening range, and the flowed range (Fig. 8b). It shows that a nonlinear hardening rule is approximated through bi-linear procedures [Eqs. (9) and (10)]. In the space of internal forces, Φ and ϕ have the same shape, i.e., Φ is an expansion of ϕ.
Member modeling
Concerning the rigid-plastic analysis, a member is considered to be rigid body, no deformation is allowed. Therefore, this section mainly devotes to the member modeling in the elastic–plastic analysis by the step-by-step methods, only the compatibility and equilibrium relations (in “Beam-column element formulation”) can be used for the both rigid-plastic and elastic-plastic analysis.
Figure 9 shows initial and deformed configurations of a frame member. The total displacement of the member may be divided into two components: the displacement of the chord and the deformation of the member (in comparison with its chord). The member deformation can be assumed to be small while the chord movement is necessary to be considered large displacement. Only the member deformation needs to be taken into account in the member formulation and the chord displacement can be separately considered. In the following, the member formulation is presented while the large displacement of the chord configuration will be lately investigated in “Large displacements”.

Member displacement
Even if the assumption of small deformation is adopted but different effects (namely P-δ, distributed plasticity, local and lateral-torsional buckling, etc.) should be taken into account for the member behavior. There exist several ways to involve the mentioned effects; the present paper summarizes a practical technique comprising two separate procedures: (1) establish the fundamental relations (compatibility, equilibrium and constitutions) using the elastic linear beam theory (Bernoulli beam) and (2) practically include the different effects to the member formulation. These two procedures will be presented in “Beam-column element formulation” and “Taking into account different effects” below, respectively.
Beam-column element formulation
In the global axes XYZ, considering an element k with attached axes (local axes) xyz (Fig. 10), let

Local axes and the length of the element k
-
e k be the vector of total deformations (generalized strains) of the element extremities in the local axes xyz and \({\mathbf{e}}_{k}^{p}\) be the plastic part of e k.
-
d k be the vector of nodal displacements in the global axes XYZ;
-
s k be the vector of internal forces at the element extremities in the local axes xyz;
-
f k be the vector of external loads applied at the two nodes in the global axes XYZ.
The compatibility, equilibrium and physical relations may be, respectively, written as:
where B k and D k are the geometrical and elastic matrices, respectively.
As the small strain is assumed for the member formulation and no special particularity is assigned for the geometric matrix (B k), the explicit form is classical and it is not presented here. The input data to build up the matrix B k are: the total length of the member chord (Fig. 10) and the matrix of direction cosines of the element. On the other hand, as the matrix D k describes the elastic relationship of the member, so the plastic deformation must be eliminated, i.e., the term (e-e P) in Eq. (13)]. Moreover, the elastic length (Fig. 10), which is the difference between the total length and the axial plastic deformations, needs to be used in the matrix D k. The matrix D k includes obviously the Young modulus and mechanical properties of the cross section.
Equation (13) presents the relation between the element forces and the elastic deformations. To accord with the compatibility condition [Eq. (11)], the physical equation would be written as the relation between the element forces and the total deformations. Using Eqs. (5) and (6) to deduce the plastic deformations e p and the plastic magnitude λ, substituting them into Eq. (13) results in:
where \({\mathbf{D}}_{k}^{ep}\) is called elastic-plastic matrix that is computed from the matrix D k and the matrix N. The details of the procedure to obtain \({\mathbf{D}}_{k}^{ep}\) and its explicit form can be found in Hoang [32].
Taking into account different effects
In this section, several techniques existing in the literature to take into account different effects that influence to the member behavior are summarized. Only the principles are presented, the detailed formulation is referred to the corresponding literature.
P-δ effect
The stability functions have been largely used to include the influence of the axial force to the member stiffness (P-δ effect). Normally, one finite element can model one physical member when the stability functions are applied. To introduce the stability functions into the formulation of the element, only the physical relation (matrix \({\mathbf{D}}_{k}^{ep}\) in Eq. (14)] is modified, the explicit forms may be found in many texts (e.g. Chen [8]).
Spread of plasticity at plastic hinge
In order to consider the partial plastic state of the section (Fig. 11), the conception of stiffness degradation functions was proposed in Liew [53]. Based on the yield surface equation, two states can be identified: (1) when the right-hand side of the yield surface (Eq. (1)) shows values reaching 0.5, the cross section is considered to start of yielding; (2) when the yield surface [Eq. (1)] is satisfied, the cross section is completely yielded (plastic hinge). The parabolic function is used to link two mentioned states. Again, only the physical matrix (\({\mathbf{D}}_{k}^{ep}\) in Eq. (14)) needs to be modified. This procedure has been detailed in many works (e.g., Liew [49], Chen [8], and Kim [42–45]).

Spread of plasticity at plastic hinge
Imperfections (residual stress and geometric imperfection) and distributed plasticity
A practical approach allowing to obtain material/geometric imperfections and distributed plasticity was proposed in Liew [53], so-called the column effective stiffness concept. Based on CRC column curve, the Young modulus of the members is assumed to be reduced to Et (Fig. 12a), and this Et is introduced to the physical matrix in Eq. (14). In Landesmann [50], the idea of the column effective stiffness was brought into play by using the European curves (Fig. 12b) where Et/E is defined to equal to N/NE.

Concept of column effective stiffness
It can be found in the literature some other ways to take into account the plasticity along the member, for example: in Izzuddin [37] an adaptive mesh is used, allowing to detect whether plastic hinges occur along the member length; or in Chiorean [11] the Ramberg–Osgood force-strain relationship was adopted to model the gradual yielding of cross sections; in Liu [54] an element including a plastic hinge was built up, allowing the occurrence of plastic hinge within the element length at an arbitrary location.
Lateral-torsional buckling effect
A procedure to consider the lateral-torsional buckling effect in the plastic-hinge analysis of 3D steel frames was proposed in Kim [44]. The procedure consists in two steps: (1) using the Standards (e.g. European/American ones) to compute the lateral-torsional buckling strength of the members; (2) replacing the plastic strengths of the cross section in the yield surface [Eq. (1)] by the obtained lateral-torsional buckling strengths. By this way, the lateral-torsional buckling is practically taken into account. In some works (e.g., [27, 47]), the lateral-torsional effect has been included during the element formulations, so this effect is sophisticatedly considered in avoiding fiber/plate/shell/solid elements. In Jiang [40], a mixed element formulation has been proposed to take into account both geometry and material nonlinearities including the lateral-torsional buckling effect.
Local buckling effect
With a similar idea for including the lateral-torsional buckling, a process to consider the local buckling effect was also proposed in Kim [45], where the plastic strength of the section in the yield surfaces involves the local buckling phenomenon.
In another context, based on the classification of cross sections given in Eurocode 3, part 1-1 [23], a procedure to check the local buckling phenomenon at critical sections was proposed in Hoang [30]. At each calculation step, the positions of the neutral axes for the critical sections are determined from the internal forces (axial force and two bending moments). When the neutral axes of the cross sections are defined, compression parts of the sections can be checked against the local buckling.
Consideration of connections
The connections, as beam-to-column joints and column bases, make up an important portion of framed structures. The connection behavior shows strong influence on the frame behavior and the cost of connections occupies a considerable part of the frame cost. Therefore, the consideration of the connection behavior and the cost in the frame analysis and the optimisation has been an intensive topic during the past 30 years. In the following, how to practically introduce the connection characteristics and cost to the plastic-hinge analysis and the optimisation of steel frames is summarized.
Modeling of connections
Due to the geometrical complexity, the modeling of connections is rather complicated and usually should be based on experimental and numerical analysis. The main characteristic of connections to be modeled is the moment-rotation relationship, what is the aim of many researches, e.g. Chen [10], Díaz [21], Jaspart [38, 39], among others. Both the experiment and numerical analysis demonstrate that the moment-rotation curve is nonlinear that the slope depends on actual form of assemblages. For the practical purpose, a lot of simple interpretations have been proposed to approximate actual moment-rotation curves. In the plastic global analysis, the elastic-perfectly plastic modeling is widely adopted. Two necessary parameters for this modeling are the initial stiffness of the connection (R) and the ultimate moment capacity (Mj,p). The approaches for determining these parameters according to various types of connection are now covered in Standards (e.g., Eurocode 3, Part 1–8 [22]) (Fig. 13).

Modeling of connection
Effect of initial stiffness of connections
In principle, the rigidity of connections may be modeled by elastic springs, Rn, Ry, Rz (Fig. 14), however, the axial spring (Rn) is habitually considered to be infinitive rigid. These elastic springs can be introduced in the member formulation and only the physical matrix [Dep in Eq. (14)] is modified, the details may be found in many texts, e.g., Chen [8], Kim [42], Ngo [63, 64].

Introduction of connection characteristics in the member modeling
Effect of partial strength connections
Let \(M_{j,py}\),\(M_{j,pz}\),\(N_{j,p}\) be, respectively, the plastic moment in Y direction, the plastic moment in Z direction and the squash load of the connections. Analog as the cross sections in principle, we have yield surfaces for connections:
The partial-yield surface (\(\bar{\varPhi }\)) is the surface that envelopes intersection zones. These zones are constituted by the intersection between the cross section yield surface and the joint yield surface (Fig. 15a).

Partial-yield surface
However, for the practical purpose, one may use the simple partial-yield surface. It is deduced from the cross section yield surface but the plastic moments of section (\(M_{py}\),\(M_{pz}\)) are replaced by the ones of joints (\(M_{j,py}\),\(M_{j,pz}\)) (Fig. 15b):
Effect of connection cost
There is clearly a correlation between the properties (stiffness and strength) and the cost of connections. Some authors mathematized this relationship to count the connection cost in optimization procedures (e.g., Xu [76], Simöes [66], Hayalioglu [28]). Generally, a member including their connections is considered to be equivalent to a member with a conventional length that may be written by Eq. (15):
f(R) is function of the connection rigidity (R). A detailed expression was provided in Simöes [66], accordingly the conventional length is increased by 20 % if it consists in pinner connections and 100 % if the extremities of the connections are fully rigid.
The conventional lengths of the members replace the actual lengths in the objective function of the optimization procedure (“Weight function”) that means the connection cost is considered in the optimal procedure.
As the connection strengths are not present in Eq. (15), in order to include them in the expression of the conventional length, a classification system given in Bjorhovde [5] may be adopted:
where ν is a constant; h is the depth of connecting beam. The graphical illustration of this behavior is shown in Fig. 16 for the ranges of rigid, semi-rigid and flexible behaviors. Let s be the ratio of connection strength, s = M j,p/M p where M p is the plastic moment of the beam. Intermediate values of the plastic moment for a given stiffness are interpolated in accordance with the dashed line (Fig. 16). Some values of s and corresponding values of ν are shown in Table 1.

Classification of connections
Weight function
In the optimization problem, the node layout of the investigated frame is considered already assigned, the objective is to find out an optimal selection of profile provided in the database. Because the plastic axial capacity is proportional to the area of the members, the weight (or the volume) of the frame is proportional to the sum of all products of the plastic axial capacity and the length, computed for each member. As mentioned in “Effect of connection cost”, the connection cost is referred to the conventional length of the members. Therefore, the objective function of the frame may be written as:
where \({\mathbf{n}}_{\text{p}}\), \({\bar{\mathbf{l}}}\) are, respectively, the vector of plastic axial capacities and the vector of the conventional lengths [see Eq. (15)].
Formulation for the whole frame
The previous sections have presented the modeling of plastic hinges, members and connections. This section aims to summarize the formulation procedures for the whole frames with various types of analysis.
Step 1: Preparation of input
For the whole frame, the following quantities need to be written under the vector or matrix forms:
-
s 0: vector of plastic capacities (axial force and two bending moments) of the cross sections (plastic hinges)
-
n p: vector of axial plastic capacities of the cross sections (it is a sub-vector of s 0).
-
l: vector of member lengths (or conventional lengths if the connection behaviors are considered)
-
f: vector of applied loads (in the global axes)
-
s E: envelop vector of elastic responses according to the domain of considered loading (the structure is considered purely elastic), it involves two extreme values: the positive s Emax and the negative s Emin
-
B: the compatibility matrix (B T is the equilibrium matrix), see Eq. (11)
-
D ep: the physical matrix, see Eq. (14)
-
N: vector containing gradients of the yield surfaces, see Eq. (5)
-
d: vector of displacements (in the global system axes)
-
ρ: vector of residual internal forces (in the local axes)
-
λ: vector of plastic magnitudes
-
s: vector of internal forces (in the local axis)
Depending on the type of problem, the above quantities may undertake different roles, as mentioned in Table 2.
Step 2: Global formulation
Based on the available data from the previous step, the governing equations for different problems may be formulated as presented in Table 3.
Step 3: Solving procedure
Incremental-iterative strategies are used for the elastic-plastic analysis while the Simplex technique is adopted for the rigid-plastic analysis/optimization (Table 4). The simplex technique is classical one and the detail can be found in many textbooks (e.g., Dentzig [20]). Generally, the incremental-iterative strategies compose three stages: (1) the predictor that aims to determinate the structure responses subjected to a give load increment; (2) the corrector aims at recovering of the element forces; and (3) the error-checking where the unbalanced forces are estimated to compare with the applied forces. Many techniques have been proposed for each stage, in particular how to pass through the limit point where the structure behavior becomes post-critical one. The details on the incremental-iterative strategies for framed structures can be found in [7, 74] among other works.
Large displacements
The plasticity of material and different effects of geometry are dealt with in “Plastic-hinge modeling” (plastic-hinge modeling) and “Member modeling” (member formulation). This section concerns the methods to capture large displacement (Fig. 9) and aims to update the deformed configuration of the chord. Generally, either the conventional second-order approach or co-rotational approach is adopted in the literature.
In the conventional second-order methods, the compatibility and equilibrium relations are written in the initial configuration of the structure. At each computation step, secondary axial force and shear forces are added to the member forces (Fig. 17). The external load that equilibrates with the secondary forces is called secondary load, causing the second effect in the frame. Due to the deformed configuration is not considered for the basic relations, so the conventional second-order approach is only valid in the case of moderate displacements, while it is not enough accurate in the case of quite large displacements. On other word, the conventional second-order approach can be used for the analysis in normal state but it is not suitable in the case of exceptional states (the robustness analysis for example). The application of the conventional approach for 3D steel frames can be found in many works (e.g. Kim [42–45]).

Additional forces in the conventional second-order approach
On the other hand, in the co-rotational approach, the deformed configuration of the chord is used to up-date the fundamental relationships; so this approach can be appropriate for the structure as far as very large displacements with a high accuracy. The co-rotational approach has been abundantly interpreted in the literature (e.g., Battini [4], Crisfield [14, 15], Izzuddin [35, 36], Mattiasson [59], Souza [72] and Teh [73]), maybe with various terminologies (namely Convected/Eulerian/etc. formulations). The main objective of researches is to treat the finite rotation in the space and there exist actually several techniques. In the following, a quite simple technique to calculate the rotation of the member around its axis, so-called “mean rotation” formulation, is chosen to present.
In fact, updating the deformed configuration means determining the local axes of the structural elements. Once the local axis is defined, the compatibility (also equilibrium) relationship [matrix B k in Eq. (11)] is accordingly determined, that means the deformed configuration is updated. It is clear that the local axes of a member are defined from: (1) the axial axis (the axis joining initial node to final node of the member) and (2) the web plan vector of the element (Table 5). The positions of the nodes (I and J) are easy to update because they concern only the translation displacements; therefore, the axial axis of the member can be straightly defined. On the other hand, the rotation of the web plan vector represents rotational movement of the member around its axis. It can be assumed that the rotation of the element equals to the mean value of the rotations according to the nodes: φ k = (φ I + φ J)/2 (Table 6). The rotation according to each node against the axial axis of the member may be deduced from the rotational components of the node about the global axes by using the second-order transformation given in Izzuddin [36] (Table 7). Once the rotation of the web plan vector is determined, the local axes of the member in a current configuration are accordingly defined (Table 8).
Numerical examples
Almost formulations presented in the previous sections have been implemented in a computer program, named CEPAO (Table 9). In the following, some numerical examples carried out by CEPAO are presented, the results are also validated by other programs.
Robustness analysis
In recent years, the robustness analysis has become a relevant topic in the research field. At University of Liege, the “loss a column” scenario is under developement by analytical, numerical and experimental approaches [see Demonceau [19] and Huvelle [34]). The main idea is to model the behavior of structures after loss of a column. In this state, the frame geometry is considerably modified and the internal forces in the frame members are strongly varied (even from purely in bending to purely in tension). This situation is out of the classical concept of the plastic-hinge analysis, simple models of plastic hinge (for example: neglecting of plastic axial deformations) and the conventional second-order approach may be not adequate. In the following, some typical examples concerning the “loss a column” scenario are analyzed by the CEPAO program. The CEPAO results are compared with the results provided by FINELG—a nonlinear finite element software developed at the University of Liege [24]. The FINELG model can be considered a plastic-zone analysis where both material and geometric aspects are considered.
Example a1
It consists in a system used for a parametric study in Huvelle [34] of which the properties are shown in Fig. 18. It concerns a beam subjected to a concentrated load at the middle span (span = 14 m). Two extremities of the beam are locked in vertical and rotational displacements, the horizontal displacement is allowed by the spring k. Due to the symmetry, only a half of the system is used to analyze. The profile IPE550, steel grade S355 (yield strength = 355 N/mm2) are used. The properties of k are varied and reported in Fig. 18: k 1 = 10,000 kN/m, k2 = 20,000 kN/m, k3 = 40,000 kN/m that are purely elastic; on the contrary, an elastic-plastic behavior is assumed for k 4 (elastic rigidity = 40,000 kN/m, plastic strength = 1020 kN). The obtained load–displacement curves given in Fig. 19 reveal a very good agreement between the two programs, even with very large displacements. It shows that the classical mechanism occurs at the load of about 280 kN, but with the membrane effect, a considerable hardening is observed; this hardening significantly depends on the spring k.

Example a1—the configuration and the properties of the considered system

Example a1—the comparison of the FINELG and CEPAO results
Example a2
It concerns a 2D frame subjected to loss a column (Fig. 20), also presented in Huvelle [34] that the analytical results were compared with the FINELG outcomes. The beam spans equal to 7 m, the column heights equal to 3.5 m; the profiles HEB300 and IPE550 are, respectively, assigned for the columns and the beams; the steel grade is S235 (yield strength = 235 N/mm2, Young modulus = 210 × 103 N/mm2), but the partial structures in the indicated zones (Fig. 20) are supposed to be purely elastic (to highlight the membrane effect). The load–displacements curves given by CEPAO and FINELG are reported in Fig. 21, again a good agreements is obtained.

Example a2—the frame description

Example a2—the comparison of the FINELG and CPEAO results
Example a3
It deals with a 3D frame of which the geometry is given in Fig. 22. All beams have the spans of 7 m and the columns are 3.5 m high. The profiles IPE550 and HEB400 are, respectively, used for the beams and the columns. The column in the first story under the point A (Fig. 22) is removed and replaced by a load P. The steel grade S355 (yield strength = 235 N/mm2 and Young modulus = 210 × 103 N/mm2) is used for the frame, but again the purely elastic material (Young modulus = 210 × 103 N/mm2) is adopted for the zone indicated in Fig. 22. The frame was analyzed by FINELG program in Kulik [49]. The load–vertical displacement curves for the point A (Fig. 22) and the deformed configurations from the FINELG and CEPAO programs are reported in Figs. 23 and 24 A very good agreement between them is observed.

Example a3—the description of the frame

Example a3—the comparison of the FINELG and CEPAO results

Example a3—the deformations given by CEPAO and FINELG
Example b
A quite complex 3D steel frame is investigated by elastic-plastic analysis in CEPAO. The frame data are presented in Fig. 25 and Table 10. The load factor = 1.48 is obtained after forming 208 plastic hinges within the frame, the load–displacement curves for the node A (Fig. 25) are shown in Fig. 26. While in examples a1, a2 and a3, the second-order effect is the membrane effect (positive effect), the second-order effect in this example b is the buckling effect.

Example b—the description of the frame

Example b—the CEPAO deformation and load–displacement curves
Limit and shakedown analysis for 3D steel frames
Example c1: six-story space frame
Fig. 27 shows an Orbison’s six-story space frame. The yield strength of all the members is 250 N/mm2 and Young’s modulus is 206 × 103 N/mm2. The floor pressure is uniform of 4.8 μ1 kN/m2; the wind loads are simulated by point loads of 26.7 μ2 kN in the Y direction at every beam-column joint, where μ1, μ2 are factors defining the loading domain.

Example c1—Six-story space frame (a perspective view, b plan view)
Example c2: twenty-story space frame
Twenty-story space frames that the dimensions and the properties are shown in Fig. 28. The yield strength of the all members is 344.8 N/mm2 and the Young modulus is 200 × 103 N/mm2. The uniform floor pressure is of 4.8 μ1 kN/m2; the wind loads 0.96 μ2 kN/m2 are activated in the Y direction.

Example c2—Twenty-story space frame (a perspective view; b plan view)
These two 3-D steel frames have been used as benchmarks in the literature concerning the advanced nonlinear analysis of steel frames (e.g. Orbison [67], Liew [51, 52], Kim [46], Chiorean [11] and Cuong [16]). The frames were also analyzed by CEPAO and the results were validated by previous works Hoang [29, 31]. In the present paper, these examples are re-presented to highlight the incremental plasticity and the phenomenon of alternating plasticity in the frames.
Concerning the loading domain in the two examples, two cases are considered for the shakedown analysis: a) 0 ≤ μ1 ≤ 1, 0 ≤ μ2 ≤ 1 and b) 0 ≤ μ1 ≤ 1, −1 ≤ μ2 ≤ 1. For the fixed or proportional loading, obviously we must have: μ1 = μ2 = 1. The uniformly distributed loads are lumped at the joints of frames.
The load multipliers are shown on Table 11 while the collapse mechanisms are reported on Figs. 29 and 30.

Example c1—deformation at limit state (left to right: limit analysis; shakedown analysis with the load domain a; shakedown analysis with the load domain b)

Example c2—deformation at limit state (left to right: limit analysis; shakedown analysis with the load domain a; shakedown analysis with the load domain b)
It appears that in the case of symmetric horizontal loading (wind load for example), the alternating plasticity occurs and corresponding load factors are very small, less than the load factors given by the second-order analysis, even the second-order effect is not yet considered in the shakedown analysis.
In the case where the alternating plasticity occurs, one may verify the results as the following. For example, with the six-story frame and the load domain b, the alternating plasticity occurs at section B (Fig. 27); in this point one has:
The elastic envelop: \(M_{y}^{ + } = M_{y}^{ - } = 186.42\) (kNm); \(N^{ + } = N^{ - } = 13.46\) (kN); \(M_{z}^{ + } = M_{z}^{ - } = 1.22\) (kNm);
The plastic capacity (W12x53): \(M_{py} = 318.70\) (kNm); \(N_{p} = 2525.00\) (kN); \(M_{pz} = 119.50\) (kNm).
For this simple case (the elastic envelop is symmetric), the load multiplier (Fig. 31) is calculated by: \(\mu = OA/OB = 1.670\); it agrees with the value given in Table 11.

Section B in the six-story frame with the load domain b
Limit optimization of 2D semi-rigid frame
A twenty-story three-bay semi-rigid frame of which the geometry and loading are shown in the Fig. 32 is optimized by CEPAO (limit optimization). Forty different groups of elements are selected as variables to be optimized (Fig. 32), European I-shaped profiles are used as database. The load factor is assigned μ = 0.25. The cost of semi-rigid connections is considered through the conventional length [Eq. (15)] that the detailed expression is given in [70]. Again the relationship between ultimate strength and initial stiffness of the connections is defined by Eq. (16) and Fig. 16. This example aims to investigate the variation of the frame weight according to connection characteristics.

Example d—the frame geometry, groups of elements and loading
As mentioned, a strategy of stability check according to Eurocode 3 is adopted for individual members. However, the second-order effect has not yet been considered in the optimization problem.
Figure 33 represents the variation of the frame weight according to connection strength in two cases considered: theoretical length and conventional length of member (to take into account the connection cost, “Effect of connection cost”). In the case where the connection cost is ignored, the minimum weight is obviously corresponding to the full strength and rigid connections. However, when the connection cost is considered, the partial strength connection (0.7) leads to an optimal solution.

Example d—Variation of the weight according to connection strengths
Summary
A quite complete picture on the plastic-hinge analysis and the optimization of 3D steel frames under static loads is made out in the present paper. From the modeling of plastic-hinges, members as well as connections to the global formulation, a whole frame is dealt with. Both the rigid-plastic and elastic-plastic methods are addressed; both the analysis and optimization procedures are concerned.
It points out that the elastic-plastic analysis by the step-by-step method is an efficient tool to globally analyze steel frames. Using the standard codes for beam columns to practically take into account different effects within the member length allows modeling the local behavior of the frame; furthermore complex formulation can be avoided. By applying the normality rule for plastic hinges and the co-rotational approach for geometrical nonlinearities, the plastic-hinge approach can describe the structure behavior with a high accuracy as far as with very large displacement. In comparison with the plastic-zone model, the plastic-hinge approach shows very good agreement results while the computation cost is strongly reduced. Accordingly, exceptional states of structures, as defined in robustness or progressive-collapse analysis, can be resolved by the plastic-hinge model instead of the plastic-zone method. However, for identifying alternating plasticity/incremental plasticity in structures, the step-by-step method is still powerless when arbitrary history is considered for the loads. Moreover, algorithm for optimization design by using the step-by-step method has not yet been straightforwardly deduced from the analysis problem.
On the other hand, the rigid-plastic analysis is quite attractive within the case of arbitrary loading histories that are the nature of almost loads applying on structures. With the shakedown analysis, the alternating plasticity and incremental plasticity phenomena can be straightforwardly analyzed without knowing the loading histories. Moreover, the rigid-plastic method takes full advantages of mathematic programming achievements in both the analysis and optimization algorithms. However, there remain many difficulties for the rigid-plastic method to take into account geometrically nonlinearities that are very explicit within steel frames.
The plastic-hinge approach can involve the connection behaviors without difficulty. The consideration of connection cost in the optimization problem provides more possibilities to obtain economical designs. The burden may arise from the mechanical modeling and the modeling of connection cost, because the connection configurations are largely varied.
It may be an interesting direction of future research to combine the two approaches: the rigid-plastic and elastic-plastic methods, for the sake of taking full advantage of both methods.
References
AISC (1993) Load and Resistance Factor Design Specification for Steel Buildings. American Institute of Steel Construction, Chicago
Bathe KJ (1996) Finite element procedures. Prentice-Hall, Englewood Cliffs, NJ
Bathe KJ (1982) Finite element procedures in engineering analysis. Prentice-Hall, Englewood Cliffs
Battini JM, Pacoste C (2002) Co-rotational beam elements with warping effects in stability problems. Comp Methods Appl Mech Eng 191:1755–1789
Bjorhovde R, Colson A, Brozzetti J (1990) Classification system for beam-to-column connections. J Struct Eng ASCE 116–11:3059–3076
Byfield MP, Davies JM, Dhanalakshmi M (2005) Calculation of the strain hardening behaviour of steel structures based on mill tests. J Constr Steel Res 61:133–150
Chan SL, Chui PPT (Ed) (2000) Nonlinear static and cyclic analysis of steel frames with semi-rigid connections. Elsevier
Chen WF, Yoshiaki G, Liew JYU (1996) Stability design of semi-rigid frames. John Wiley and sons, inc
Chen WF, Han DJ (1988) Plasticity for structural engineers”. Springer-Verlag, New York
Chen WF, Kishi N (1989) Semi-rigid steel beam-to-column connexions: data base and modeling. Struct Eng ASCE 115–1:105–119
Chiorean CG, Barsan GM (2005) Large deflection distributed plasticity analysis of 3D steel frameworks. Comput Struct 83:1555–1571
Cocchetti G, Maier G (2003) Elastic-plastic and limit-state analysis of frames with softening plastic-hinge models by mathematical programming. Int J Solids Struct 40:7219–7244
Cohn MZ, Maier G (1979) Engineering plasticity by mathematical programming. University of Waterloo, Canada
Crisfield MA, Moita GF (1996) A unified co-rotational framework for solids, shells and beams. Int J Solids Structs 33:2969–2992
Crisfield MA (1990) A consistent co-rotational formulation for non-linear, three dimensional beam elements. Comput Methods Appl Mech Engrg 81:131–150
Cuong NH, Kim SE, Oh JR (2006) Nonlinear analysis of space frames using fibre plastic hinge concept. Eng Struct 29:649–657
Davies JM (2002) Second-order elastic-plastic analysis of plan frames. J Constr Steel Res 58:1315–1330
Davies JM (2006) Strain hardening, local buckling and lateral-torsional buckling in plastic hinges. J Constr Steel Res 62:27–34
Demonceau JF (2008) Steel and composite building frames: sway response under conventional loading and development of membrane effects in beams further to an exceptional action. PhD thesis, University of Liege
Dentzig GB (1966) Application et prolongement de la programmation linéaire. Dunord, Paris
Diaz C, Marti P, Victoriam, Querin OM (2011) Review on the modelling of joint behaviour in steel frames. J Construct Steel Res 67:741–758
EUROCODE-3 (1993) Design of steel structures—Part 1–8: design of connexions”. European Committee for Standardization
Eurocode-3 (1993) Design of steel structures—Part 1-1: General rules and rules for building. European Committee for Standardization
Finelg User’s Manuel (2003) Non-linear finite element analysis program. Version 9.0, University of Liege
Franchia, Grierson DE, Cohn MZ (1979) An elastic-plastic analysis computer system. Solid Mechanic Division Paper 157, University of Waterloo, Canada
Grierson DE (1974) Computer-based methods for the plastic analysis and design of building frames. In: ASCE-IABSE Joint Committee on Planning and Design of Tall Building, Report to Technical Committee 15
Gu JX, Chan SL (2005) A refined finite element formulation for flexural and torsional buckling of beam-column with finite rotation. Eng Struct 27:749–759
Hayalioglu MS, Degertekin SO (2005) Minimum cost design of steel frames with semi-rigid connection and column bases via genetic optimization. Comput Struct 83:1849–1863
Hoang-Van L, Nguyen-Dang H (2008) Limit and shakedown analysis of 3-D steel frames. Eng Struct 30:1895–1904
Hoang-Van L, Nguyen-Dang H (2008) Local buckling check according to Eurocode-3 for plastic-hinge analysis of 3-D steel frames. Eng Struct 30:3105–3513
Hoang-Van L, Nguyen-Dang H (2008) Second-order plastic-hinge analysis of 3-D steel frames including strain hardening effects. Eng Struct 30:3505–3512
Hoang-Van L, Nguyen-Dang H (2010) Plastic optimization of 3-D steel frames under fixed or repeated loading: reduction formulation. Eng Struct 32:1092–1099
Hodge PG (1959) Plastic analysis of structures. McGraw Hill, New York
Huvelle C, Hoang-Van L, Jaspart JP, Demonceau JF (2015) Complete analytical procedure to assess the response of a frame submitted to a column loss. Eng Struct 86:33–42
Izzuddin BA (2001) Conceptional issues in geometrically nonlinear analysis of 3-D framed structures. Comp Methods Appl Mech Eng 191:1029–1053
Izzuddin BA, Elnashai AS (1993) Eulerian formulation for large displacement analysis of space frames. J Eng Mech 119–3:549–569
Izzuddin BA (1999) Adaptive space frames analysis, Part I: plastic hinge approach. Proc Inst Civil Eng Struct Bldgs 303–316
Jaspart JP (2000) General report: section on connections. J Constr Steel Res 55:69–89
Jaspart JP (1997) Recent advances in the field steel joints column—Bases and further configurations for beam-to-column joints and beam splices. Professorship thesis, University of Liège
Jiang XM, Chen H, Liew JYR (2002) Spread-of-plasticity analysis of three-dimensional steel frames. J Constr Steel Res 58:193–212
Jirásek M, Bazant ZP (2001) Inelastic analysis of structure. John Wiley and Sons, LTD, NewYork
Kim SE, Choi SH (2001) Practical advanced analysis for semi-rigid space frames. Int J Solids Struct 38:9111–9131
Kim SE, Cuong NH, Lee DH (2006) Second-order inelastic dynamic analysis of 3-D steel frames. Int J Solids Struct 43:1693–1709
Kim SE, Lee J, Park JS (2002) 3-D second—order plastic-hinge analysis accounting for lateral torsional buckling. Int J Solids Struct 39:2109–2128
Kim SE, Lee J, Part JS (2003) 3-D second—order plastic-hinge analysis accounting for local buckling. Eng Struct 25:81–90
Kim SE, Park MH, Choi SH (2001) Direct design of three-dimensional frames using advanced analysis. Eng Struct 23:1491–1502
Kim SE, Uang CM, Choi SH, An KY (2006) Practical advanced analysis of steel frames considering lateral-torsional buckling”. Thin-Walled Struct 44:709–720
Konig JA (1987) Shakedown of elastic-plastic structures. Elsevier, Amsterdam
Kuliks (2013) Robustness of steel structures: consideration of couplings in a 3D structure. Master thesis, University of Liege
Landesmann A, Batista EM (2005) Advanced analysis of steel buildings using the Brazilian and Eurocode-3. J Construct Steel Res 61:1051–1074
Liew JYR, Chen H, Sganmugam NE, Chen WF (2000) Improved nonlinear plastic hinge analysis of space frame structures. Eng Struct 22:1324–1338
Liew JYR, Chen H, Sganmugam NE (2001) Inelastic analysis of steel frames with composite beams. J Struct Eng ASCE 127(2):194–202
Liew JYR, White DW, Chen WF (1993) Second order refined plastic hinge analysis for frame design: parts 1 and 2. J Struct Eng ASCE 119(11):1237–3196
Liu SW, Yao-Peng Liu YP, Chan SL (2014) Direct analysis by an arbitrarily-located-plastic-hinge element—Part 2: spatial analysis. J Construct Steel Res 106:316–326
Lubliner J (1990) Plasticity theory. Macmilan Publising Company
Maier G, Garvelli V, Cocchetti G (2000) On direct methods for shakedown and limit analysis. Eur J Mech A Solids 19:S79–S100
Maier G (1982) Mathematical programming applications to structural mechanics: some introductory thoughts. Key Note, Workshop of Liège
Massonnet CH, Save M (1976) Calcul plastique des constructions (in French), Volume. Nelissen, Belgique
Mattiasson K, Samuelsson A (1984) Total and updated Lagrangian forms of the co-rotational finite element formulation in geometrically and materially nonlinear analysis. In: Numerical Methods for Nonlinear Problems II, Swansea, pp 134–151
Meas O (2012) Modeling yield surfaces of various structural shapes. Honor’s Theses, Bucknell University 2012
Mróz Z, Weichert D, Dorosz S (1995) Inelastic behaviour of structures under variable loads. Kluwer, Dordrecht, the Netherlands
Neal BG (1956) The plastic method of structural analysis. Chapman and Hall, London
Ngo HC, Nguyen PC, Kim SE (2012) Second-order plastic-hinge analysis of space semi-rigid steel frames. Thin-Walled Struct 60:98–104
Ngo HC, Kim SE (2014) Nonlinear inelastic time-history analysis of three-dimensional semi-rigid steel frames. J Constr Steel Res 101:192–206
Nguyen-Dang H (1984) Sur la plasticité et le calcul des états limites par élément finis (in French). Special PhD thesis, University of Liege
Nguyen-Dang H (1984) CEPAO-an automatic program for rigid-plastic and elastic-plastic, analysis and optimization of frame structure. Eng Struct 6:33–50
Orbison JG, Mcguire W, Abel JF (1982) Yield surface applications in nonlinear steel frame analysis. Comp Method Appl Mech Eng 33:557–573
Parimi SR, Ghosh SK, Conhn WZ (1973) The computer programme DAPS for the design and analysis of plastic structures”. Solid Mechanics Division Report 26, University of Waterloo, Canada
Save M, Massonnet CH (1972) Calcul plastic des constructions (in French), Volume 2. Nelissen, Belgique
Simoes LMC (1996) Optimization of frames with semi-rigid connections. Comput Struct 60–4:531–539
SMITH DL (1990) (Ed) Mathematical programming method in structural plasticity. Springer–Verlag, New York
Souza RMD (2000) Force-based finite element for large displacement inelastic analysis of frames. PhD thesis, University of California, Berkelay
Teh LH, Clarke MJ (1998) Co-rotational and Lagrangian formulation for elastic three-dimensional beam finite elements. J Construct Steel Res 48:123–144
Wang F, Liu Y (2009) Total and incremental iteration force recovery procedure for the nonlinear analysis of framed structures. Advan Steel Construct 5(4):500–514
Weichert D, Maier G (eds) (2000) Inelastic analysis of structures under variable repeated loads. Kluwer, Dordrecht
Xu L, Grierson DE (1993) Computer- automated design of semi-rigid steel frameworks. J Struct Eng ASCE 119–6:1741–1760
Authors’ contributions
V-LH, DHN, J-PJ and J-FD carried out the study. V-LH drafted and revised the manuscript. All authors read and approved the final manuscript.
Competing interests
The authors declare that they have no competing interests.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Hoang, VL., Nguyen Dang, H., Jaspart, JP. et al. An overview of the plastic-hinge analysis of 3D steel frames. Asia Pac. J. Comput. Engin. 2, 4 (2015). https://doi.org/10.1186/s40540-015-0016-9
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s40540-015-0016-9